
В настоящее время робот является универсальным оборудованием. Если на него установить шпиндель — он будет фрезеровать, сварную головку — он будет варить, резак — он будет резать. У робота множество применений, но не все из них могут быть реализованы из-за сложностей в программировании.
В чем сложность программирования промышленных роботов?
При подготовке управляющей программы нужно не только транслировать траекторию в машинные коды робота, но и учитывать ограничения вращения каждого сустава. Также следует избегать соударения робота с обрабатываемым изделием и другими элементами роботизированной ячейки. Чем сложнее задача по автоматизации, тем сложнее роботизированная ячейка. Она может состоять из специализированной оснастки, ограждений, позиционеров или даже содержать несколько промышленных роботов. Положения всех элементов ячейки должны быть учтены еще на этапе проектирования управляющей программы. Наконец, нельзя допустить, чтобы робот попал в зоны сингулярности, то есть нужно исключить такие взаимные положения суставов робота, при которых он перестает быть контролируемым.

Рис. 1. Пример роботизированной ячейки
Преимущества программирования в «SprutCAM Робот»
1. Функционал. В системе присутствуют такие операции, как:
- плоское и объемное фрезерование,
- обрезка кромок,
- гравировка,
- сварка,
- наплавка,
- резка (лазерная, плазменная, гидроабразивная).
2. Учет ограничения по вращению суставов робота. Можно задать минимальное и максимальное положение каждого сустава, исходя из особенностей «обвеса» робота. Траектория при этом будет рассчитываться только в допустимых пределах перемещения осей.
3. Учет зон сингулярности. Траектория в «SprutCAM Робот» полностью исключает зоны сингулярности каждого конкретного робота.
4. Проверка на соударения и моделирование. В системе проверка на соударения осуществляется еще на этапе расчета траектории. С помощью оптимизатора осей можно найти наиболее подходящую траекторию, исключающую все «неприятные» зоны робота. При этом доступно моделирование процесса обработки. Пользователь может посмотреть, как именно перемещается робот и другие подвижные элементы роботизированной ячейки.
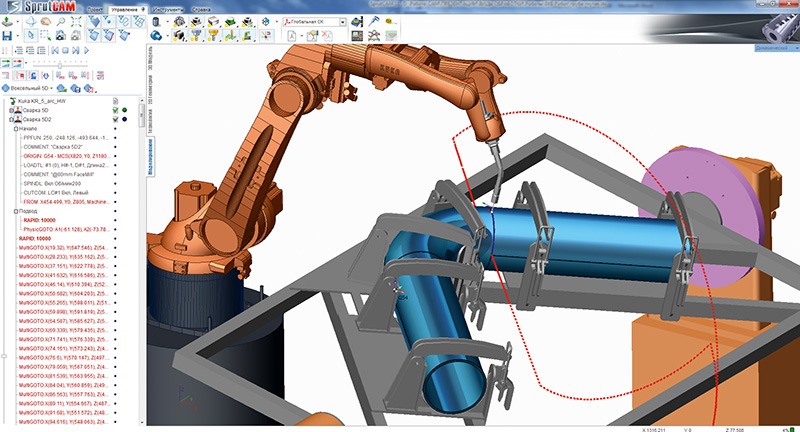
Рис. 2. Моделирование сварки в «SprutCAM Робот»

Рис. 3. 3D-модели промышленных роботов в «SprutCAM Робот»
5. Управление 6‑й осью. Шестая, «избыточная» ось робота может быть повернута на любой угол в процессе работы. В «SprutCAM Робот» есть специальный параметр по ее регулированию. Например, можно указать перемещение 6‑й оси по траектории. Это значит, что исполнительный орган будет одинаково расположен по отношению к траектории все время движения робота. Ярким примером такого использования служит применение датчиков технического зрения при сварке. Датчик в таком случае «видит» отклонение реального шва от запрограммированной траектории.
6. Библиотека роботов. В «SprutCAM Робот» можно программировать любых шестиосевых промышленных роботов последовательной структуры. Библиотека 3D-моделей роботов с постпроцессорами для трансляции управляющих программ содержит всех наиболее популярных роботов в мире.
7. Дополнительные оси. В «SprutCAM Робот» можно добавлять линейные блоки и поворотные позиционеры, тем самым воспроизводя на компьютере реальную роботизированную ячейку.
8. Удобная коррекция траектории при подходах и отходах. Пользователь может добавлять промежуточные точки в траектории робота на подходах и отходах каждой операции. При этом в системе доступен ряд «привязок» для удобства назначения таких точек.
Все эти возможности системы «SprutCAM Робот» позволяют раскрыть потенциал промышленного робота и сделать работу по его программированию удобной и эффективной.
(495) 181-00-13, www.csprut.ru






