
Как программировать сложное оборудование?
В настоящее время предприятия отдают предпочтение все более сложным схемам станков. Цель проста — изготовить сложную деталь за одну операцию. Но за выигрыш в производительности приходится платить растущей сложностью управляющих программ. И здесь на помощь приходит отечественная система SprutCAM. Мощные инструменты моделирования позволяют программировать станки практически любой сложности, а широкий функционал — осуществить подготовку УП для различных групп оборудования в одной программе.
Как задействовать все возможности станка
Ярким примером такого современного многофункционального оборудования может служить станок Willemin Macodel 508MT (рис. 1). Одной из его особенностей является многопозиционный револьвер. Поворачиваясь в различные положения, он может использоваться как противошпиндель, как задний центр, как тиски для поддержки или независимой обработки детали (рис. 2). Инструментальный шпиндель также имеет поворотную ось B и может использоваться как для токарной, так и для фрезерной обработки. В результате количество управляемых осей данного станка достигает 8.
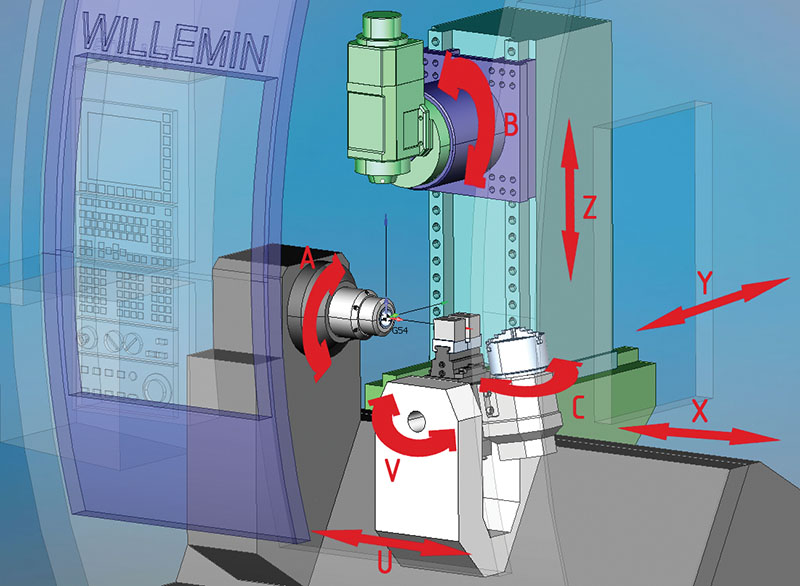
Рис. 1. Схема станка Willemin Macodel 508MT в SprutCAM
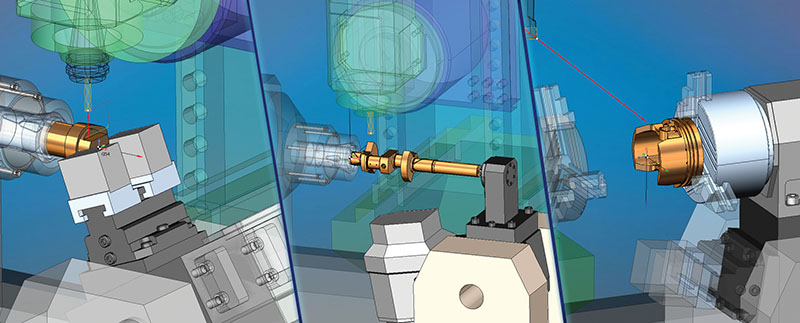
Рис. 2. Обработка с поддержкой тисками, с использованием заднего центра, в противошпинделе
С какими же проблемами сталкивается технолог при программировании такого станка? Во‑первых, это определение положения инструмента в системе координат заготовки. Ведь заготовка в процессе обработки может быть установлена в шпинделе, тисках или противошпинделе, а также повернута на произвольный угол вместе с револьвером. При повороте инструментального шпинделя разворачивается и система координат. В результате управляющая траектория должна быть рассчитана в наклоненной плоскости с учетом всех перемещений.
Во‑вторых, станок имеет достаточно тесную рабочую зону. Поэтому особенно остро стоит проблема столкновений узлов станка, заготовки, инструмента и элементов оснастки в различных комбинациях.
В SprutCAM эти задачи решаются следующим образом: создается виртуальная модель оборудования. Она представляет собой кинематическую схему, в которой с каждым узлом станка связана трехмерная модель. На этой модели производится виртуальная обработка детали. Кинематическая схема берет на себя часть функций технолога: рассчитывает наклоны и смещения систем координат (рис. 3), контролирует пределы перемещений по осям, учитывает правила отхода в точку смены инструмента. С такой виртуальной моделью программирование сложного оборудования сводится к простым операциям.
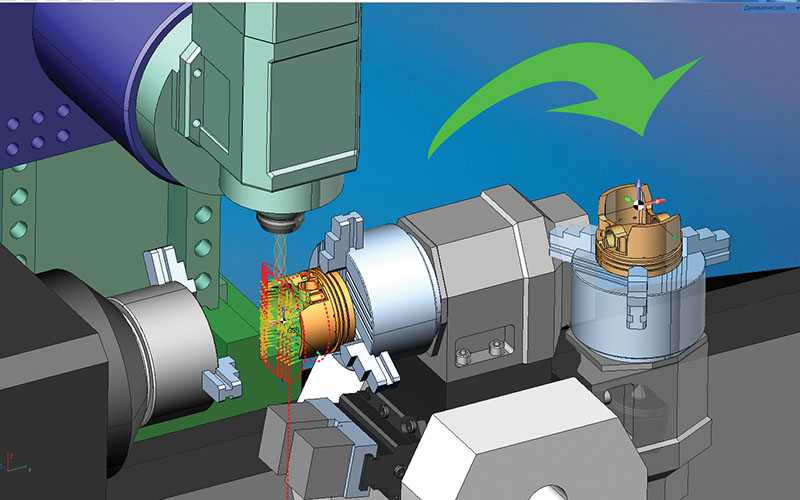
Рис. 3. Разворот противошпинделя в вертикальную позицию
Алгоритмы системы в совокупности с кинематической схемой и отлаженным постпроцессором автоматически генерируют управляющую программу. Такая УП надежна, потому что полностью повторяет процесс обработки, смоделированный технологом.
Широкий спектр оборудования
Аналогичный подход используется при разработке управляющих программ для других сложных схем оборудования. Например, на рис. 4 показаны: токарно-фрезерный станок с двумя револьверами, пятиосевой фрезерный станок, токарный автомат и промышленный робот с семью осями.
Раскройте весь потенциал своего оборудования и перейдите на выполнение более сложных заказов!
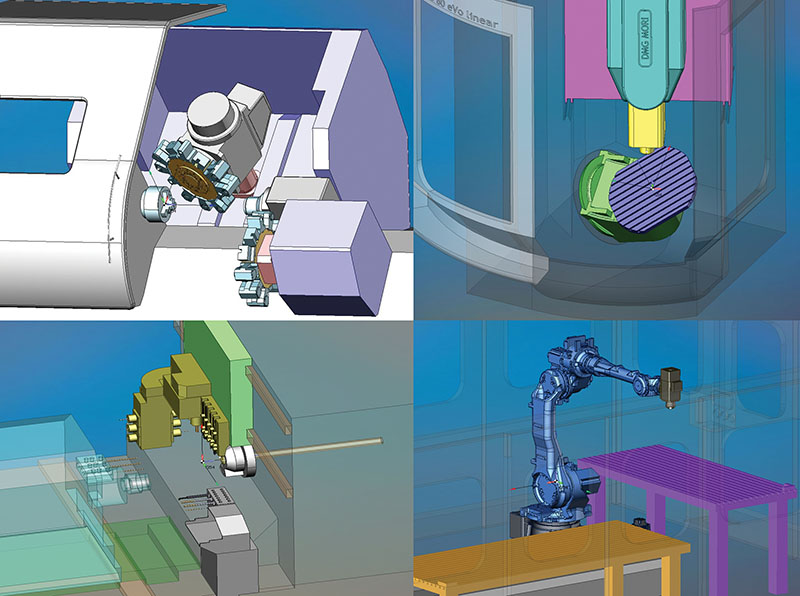
Рис. 4. Виртуальные модели оборудования в SprutCAM
Николай Александрович Романов, Александр Валерьевич Частухин
ООО «Центр СПРУТ-Т»
г. Москва, (495) 181-00-13, www.sprut.ru
Еще больше новостей |





