
Ученые Санкт-Петербургского государственного электротехнического университета «ЛЭТИ» применили корреляционный фильтр для обработки двухмерных лазерных сканов, который позволит высвободить вычислительные ресурсы робота для решения других задач.
Исследователи СПбГЭТУ «ЛЭТИ» предложили алгоритм фильтрации лазерных сканов с лидаров, основанный на соответствии сканов друг другу. Новый подход позволит сократить среднее время обработки информации и повысить производительность робота за счет оптимизации затрат его вычислительных ресурсов. Исследователи разработали формулы, позволяющие адаптировать фильтр к конкретному роботу с известной скоростью и характеристиками лидара, а также предложили при движении в помещении использовать детектор коридоров. Результаты исследования опубликованы в высокорейтинговом международном журнале Robotics and Autonomous Systems.
В современной робототехнике применяются лидары и дальномеры, работающие на алгоритмах SLAM (одновременная локализация и построение карты) и SfM (структура из движения). Обе технологии имеют общий недостаток – они собирают одновременно слишком мало и слишком много информации. С одной стороны, данных слишком мало, потому что их невозможно обобщить без существенной потери точности. В то же время для хранения и обработки данных, которые собираются каждые 30 мс, требуется большой объем памяти. Например, для робота, который движется со скоростью меньше 60 км/ч, нет необходимости сканировать пространство столь часто, иначе точность собираемой информации снижается из-за избыточного количества густых облаков точек.

Проанализировав существующие методики уменьшения размеров лазерного скана, заведующий кафедрой математического обеспечения и применения ЭВМ (МО ЭВМ) СПбГЭТУ «ЛЭТИ» Кирилл Владимирович Кринкин и ассистент этой же кафедры Антон Юрьевич Филатов пришли к выводу: чтобы ускорить фильтрацию, нужно уменьшить количество входных данных и определить ценность каждого сканирования для последующей передачи исходного скана в ядро алгоритма SLAM.
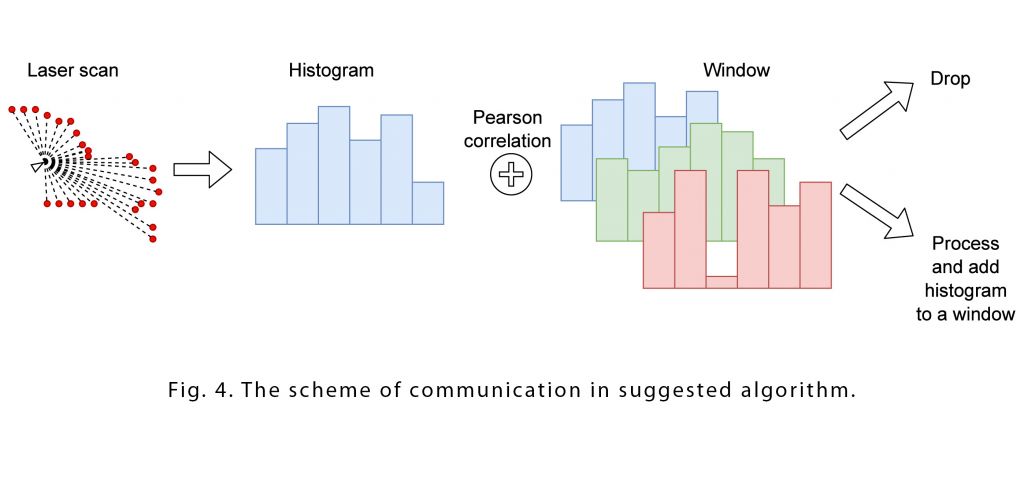
Для решения поставленной задачи исследователи ЛЭТИ предложили использовать корреляционный фильтр для двухмерных лазерных сканов. Принцип его действия заключается в сравнении текущего входящего лазерного скана с предыдущим. Если сканы «информационно похожи», то текущий скан не обрабатываться. «Чтобы избежать шума в наблюдениях, лучше сравнивать входящий скан с несколькими предыдущими сканами. Таким образом, появляется скользящее окно сканов, которое играет роль эталона для новых входящих данных», – поясняет К.В. Кринкин.
Для расчета корреляции сканов было предложено создавать для каждого из них гистограммы, основанные на разделении по дальности и по углам, а затем производить расчет корреляции путем вычисления коэффициента Пирсона.
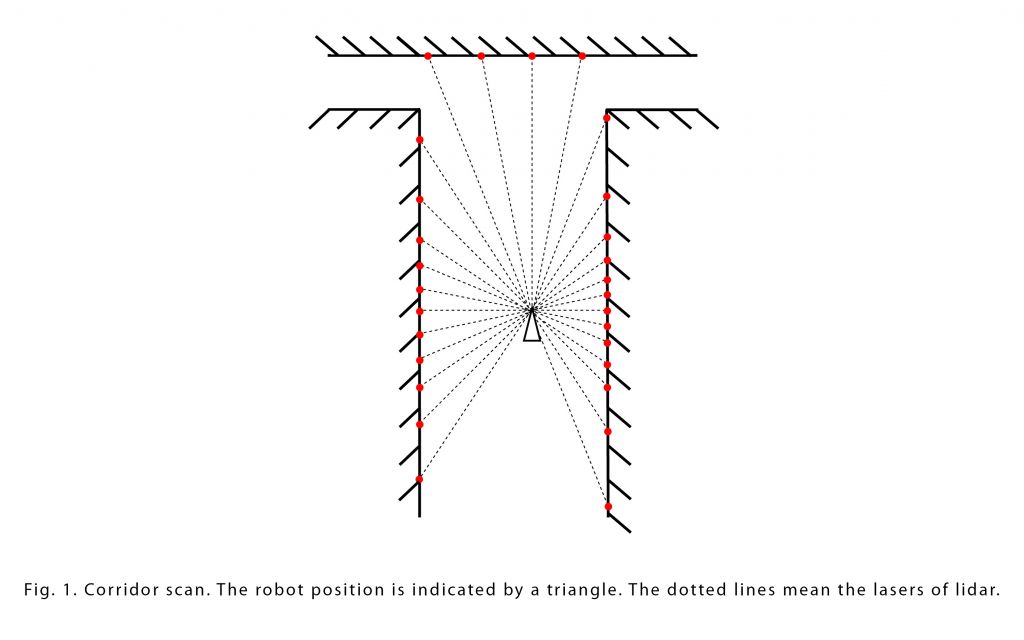
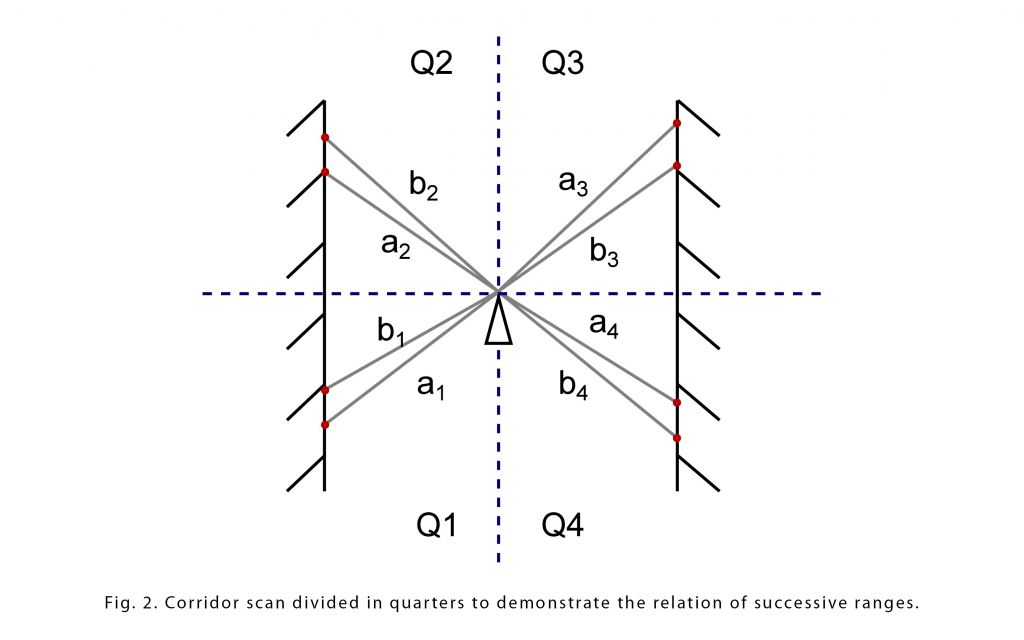
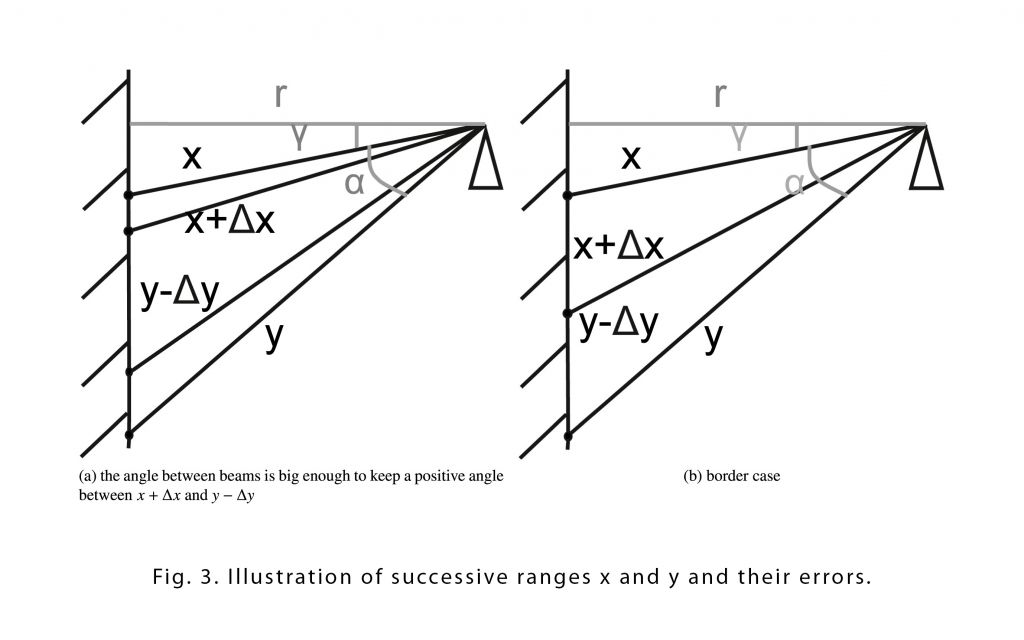
Чтобы не потерять полезную информацию при движении робота по средам без особенностей, например, по коридорам, ученые предложили обнаруживать сканы таких сред до фильтрации и не отбрасывать их. Для этого необходимо просмотреть каждую точку лазерного сканирования и вычислить знак разности дальностей текущей и следующей точек. Точность определения зависит от строения коридора и может быть разной в конкретных условиях.
Исследователи протестировали предложенный метод на наборах данных MIT stata dataset и TUM dataset с алгоритмами vinySLAM, Gmapping и Google Cartographer.
«Эксперименты показали, что предложенный алгоритм фильтрации работает значительно быстрее, чем имеющиеся алгоритмы сопоставления сканов (5,9⋅10-5 с для фильтрации, 12,9⋅10-3 с для совмещения сканов vinySLAM). Данный метод позволяет более чем на 40% сэкономить время обработки сканов, а также высвободить вычислительные ресурсы для решения других задач», – резюмирует Кирилл Владимирович Кринкин.
Исследование выполнено на средства гранта Министерства науки и высшего образования Российской Федерации. Отдельные материалы и оборудование предоставлены компанией JetBrains Research.
Еще больше новостей |



