
Развитие роботизированных систем и комплексов позволяет создавать новые перспективные технологии, которые становятся основой инновационного развития внутреннего рынка России, а также обеспечивают устойчивое положение страны на внешнем рынке. В статье показаны примеры применения отечественных роботов параллельной структуры для аддитивных технологий в авиации и в медицине.
Одним из приоритетных направлений развития науки, технологий и техники Российской Федерации является разработка робототехнических комплексов (систем) военного, специального и двойного назначения [1]. Это положение отражено в Стратегии научно-технологического развития Российской Федерации на ближайшие 10–15 лет [2] и предполагает создание новых машин, обладающих прорывными технологическими решениями с расширенными функциональными возможностями. Рассмотрим некоторые уникальные разработки, находящие применения в широком спектре областей науки, техники, народного хозяйства [3–6].
На сегодняшний день наблюдается стремительный рост использования аддитивных технологий в современном мире в широком спектре областей науки и техники [7, 8] для создания технически сложных деталей и устройств, предъявляющих особые требования к используемым материалам и роботам [9]. В Институте машиноведения им. А. А. Благонравова (ИМАШ РАН) ведется ряд разработок, направленных на решение значительных проблем авиационной промышленности. Изготовление деталей сопла турбореактивного двигателя повышенной прочности (рис. 1) с высокими антикоррозионными свойствами и одновременно совершенствование структуры металла поверхностного слоя для снижения инфракрасного излучения и акустического шума является актуальной задачей.
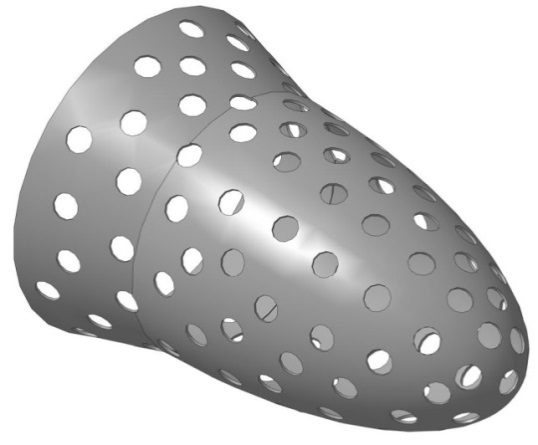
Рис. 1. Схематичное изображение центрального тела сопла ТРД
В ИМАШ РАН разработан роботизированный технологический комплекс на основе механизмов параллельной структуры с пятью степенями свободы, позволяющий значительно уменьшить недостатки технологического процесса изготовления, а также существенно повысить прочность, надежность, антикоррозионные свойства изготавливаемого трехмерного объекта посредством применения аддитивной технологии высокой точности (рис. 2).
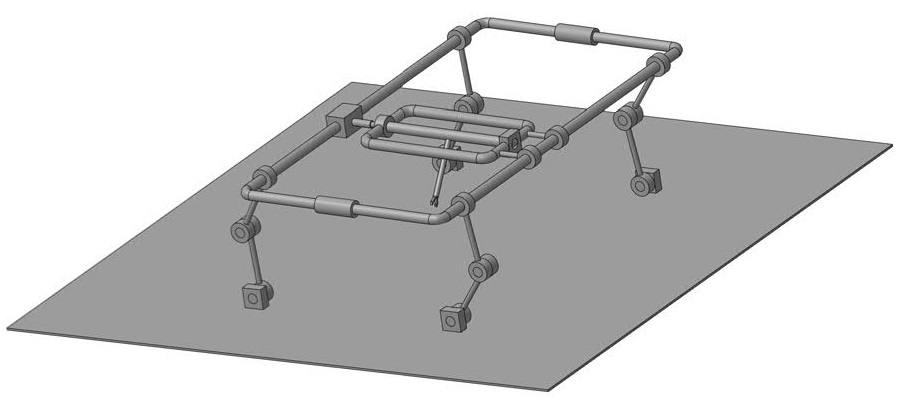
Рис. 2. Схематичное изображение механизма параллельной структуры с пятью степенями свободы
Высокая точность позиционирования рабочего инструмента, низкий уровень вибраций, повышенная жесткость достигается применением ферменной конструкции с расположением двигателей на основании.
Использование роботов параллельной структуры может качественно улучшить показания зондовой диагностики работы авиационных двигателей. На сегодняшний день зондовые измерения проводятся часто в сжатые сроки, что приводит к ограниченному числу замеров. Несовершенство механизмов, особенно управляемых вручную, приводит к потерям точности. Зондовая диагностика плазменных потоков, истекающих в том чис-ле из ракетных двигателей различного типа, весьма чувствительна к положению зонда, его форме, а также влиянию на плазменный поток самого зонда и вспомогательных механизмов [10]. Применение разработанного в ИМАШ РАН механизма параллельной структуры с пятью степенями свободы может существенно улучшить качество проводимых экспериментов (рис. 3), а именно — дает возможность проводить зондовые измерения плазменных потоков с необходимой скоростью по заданной траектории с минимальным влиянием на турбулентные потоки: исследовать краевые и концевые эффекты, влияние ориентации зонда в потоке плазмы, получать вольт-амперные характеристики плоских зондов в зависимости от параметров задачи [11].
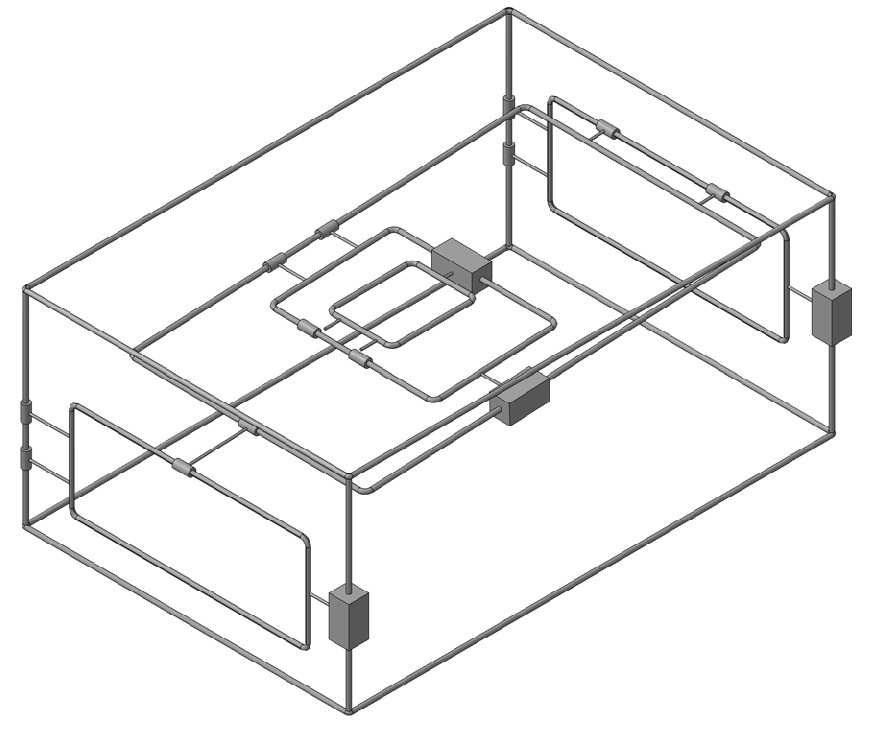
Рис. 3. Механизм с пятью степенями и двумя вертикальными линейными двигателями
В течение ряда лет развивается сотрудничество между Институтом машиноведения им. А. А. Благонравова РАН и Национальным Центром Научных исследований (Франция), где ведутся интенсивные исследования роботов параллельной структуры.
Один из роботов такого класса получил название «ПАМИНСА» (параллельный манипулятор, разработанный в INSA — Национальный институт прикладных наук) — рис. 4.
![Рис. 4. Робот «ПАМИНСА» [12]](/sites/default/files/Public/RHYRHM_of_machinery_2_2019/statia_robototexnika_ris4_rhythm_of_machinery_2_2019.png)
Рис. 4. Робот «ПАМИНСА» [12]
Схема робота DELTA, в котором изменено положение основания и выходного звена (рис. 5), была предложена профессором В. Аракеляном и исследована доктором С. Брио [13]. Смысл данного преобразования заключается в том, что шарнирные параллелограммы, входящие в каждую кинематическую цепь, должны быть расположены ближе к основанию. Это снижает энергетические потери и увеличивает жесткость. Соответствующие исследования показали, что данный манипулятор обладает лучшими характеристиками, чем робот DELTA. Наиболее эффективным методом исследования структуры, кинематики и динамики роботов этого класса является винтовое исчисление.
![Рис. 5. Инверсивный робот DELTA [13]](/sites/default/files/Public/RHYRHM_of_machinery_2_2019/statia_robototexnika_ris5_rhythm_of_machinery_2_2019.png)
Рис. 5. Инверсивный робот DELTA [13]
Следующим этапом исследований явилась совместная работа с Исследовательским институтом кибернетики и коммуникаций (г. Нант), где в настоящее время работает доктор С. Брио. Совместно с В. Аракеляном и С. Брио был разработан новый класс механизмов параллельно-перекрестной структуры, в которых соединительные кинематические цепи могут быть связаны между собой [14, 15]. Этот факт обусловливает упрощение конструкций основания и выходного звена. Серьезное внимание было уделено повышению функциональных возможностей роботов параллельной структуры на основе изменения положения приводных кинематических пар [16, 17].
Приведем еще некоторые примеры. В Высшей технологической школе (Франция) был разработан и исследован робот параллельной структуры для применения в качестве манипулятора в составе аппарата для ультразвуковой диагностики артерий (рис. 6) [16]. Предлагаемая частично статически сбалансированная система позволяет уменьшить размеры исполнительных устройств и сделать их безопаснее.
![Рис. 6. Модель робота-манипулятора в составе УЗ-диагностического оборудования [16]](/sites/default/files/Public/RHYRHM_of_machinery_2_2019/statia_robototexnika_ris6_rhythm_of_machinery_2_2019.png)
Рис. 6. Модель робота-манипулятора в составе УЗ-диагностического оборудования [16]
С целью увеличения возможностей механической руки (рис. 7) разработана система управления на основе экзоскелета (рис. 8) [17].
![Рис. 7. Механическая рука [17]](/sites/default/files/Public/RHYRHM_of_machinery_2_2019/statia_robototexnika_ris7_rhythm_of_machinery_2_2019.png)
Рис. 7. Механическая рука [17]
![Рис. 8. Экзоскелет [17]](/sites/default/files/Public/RHYRHM_of_machinery_2_2019/statia_robototexnika_ris8_rhythm_of_machinery_2_2019.jpg)
Рис. 8. Экзоскелет [17]
Экзоскелет по кинематической структуре и размерам идентичен механической руке, что позволяет достаточно легко получить необходимые траектории движения элементов робота без использования внешних датчиков, что было проверено при помощи САПР и экспериментально. Также он аналогичен механической руке по своей подвижности, что способствует адаптации человека-оператора к манипулированию предметами посредством экзоскелета.
Для минимизации вмешательства в организм при диагностике и хирургических операциях разрабатываются интеллектуальные активные эндоскопы, представляющие собой мини-роботов (рис. 9) [18, 19].
![Рис. 9. Робот-эндоскоп [18]](/sites/default/files/Public/RHYRHM_of_machinery_2_2019/statia_robototexnika_ris9_rhythm_of_machinery_2_2019.jpg)
Рис. 9. Робот-эндоскоп [18]
Кроме того, ведутся исследования с использованием генетических алгоритмов и генетического программирования. На этой основе оптимизированы алгоритмы, учитывающие структурные аспекты и аспекты управления при разработке решений для активной эндоскопии (рис. 10).
![Рис. 10. Моделирование движения активного эндоскопа [19]](/sites/default/files/Public/RHYRHM_of_machinery_2_2019/statia_robototexnika_ris10_rhythm_of_machinery_2_2019.png)
Рис. 10. Моделирование движения активного эндоскопа [19]
В статье Н. Сэнкизи и В. Паренти-Кастелли [20] представлена разработка механической модели движения коленного сустава человека (рис. 11).
![Рис. 11. Кинематическая эквивалент 5–5 параллельного механизма, описывающего движение коленного сустава [20]](/sites/default/files/Public/RHYRHM_of_machinery_2_2019/statia_robototexnika_ris11_rhythm_of_machinery_2_2019.jpg)
Рис. 11. Кинематическая эквивалент 5–5 параллельного механизма, описывающего движение коленного сустава [20]
Разрабатывается портативный робот-ассистент для проведения операций по замене коленных суставов (рис. 12) [21].
![Рис. 12. Выравнивание осей бедренной кости пациента и оси протеза [21]](/sites/default/files/Public/RHYRHM_of_machinery_2_2019/statia_robototexnika_ris12_rhythm_of_machinery_2_2019.png)
Рис. 12. Выравнивание осей бедренной кости пациента и оси протеза [21]
В статьях Янгмин Ли и Цинсун Сюй [22, 23] представлена разработка и исследование модификации уже упоминавшегося робота DELTA для применения в кардиологии с целью проведения сердечно-легочной реанимации (рис. 13). Его отличительная особенность в том, что приводы вращательные, а движение поступательное, что возможно за счет использования в каждой кинематической цепи шарнирного параллелограмма.
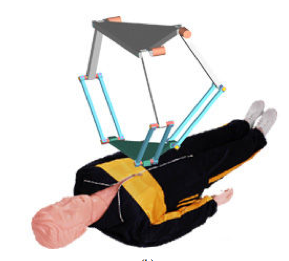
Рис. 13. Модель модифицированного робота DELTA, применяемого для сердечно-легочной реанимации
Таким образом, создание и разработка механизмов параллельной структуры имеет ряд преимуществ, таких как: скорость, полезная нагрузка, точность производимых манипуляций. Создаются механизмы, имеющие широчайший потенциал применения: в аддитивных технологиях при производстве центрального тела сопла авиационного двигателя, при зондовой диагностике плазменных потоков, в медицинской сфере при проведении высокоточных операций и многих других отраслях. Произведенные расчеты и испытания экспериментальных образцов подтверждают правильность выбранного подхода.
Литература
1. Указ Президента РФ от 16.12.2015 N 623 «О Национальном центре развития технологий и базовых элементов робототехники».
2. Указ Президента РФ от 01.12.2016 N 642 «Об утверждении стратегии научно-технологического развития Российской Федерации».
3. Глазунов В. А. Структура пространственных механизмов. Группы винтов и структурные группы // Справочник. Инженерный журнал. 2010. Приложение № 3. 24 с.
4. Чунихин А. Ю., Глазунов В. А. Разработка механизмов параллельной структуры с пятью степенями свободы, предназначенных для технологических роботов // Проблемы машиностроения и надежности машин. 2017. № 4. С. 3–11.
5. Чунихин А. Ю., Глазунов В. А., Скворцов С. А., Духов А. В. Пространственный механизм с пятью степенями свободы. Патент РФ на полезную модель № 160127. 2016. Бюл. № 7.
6. Козырев А. В., Глазунов В. А., Артеменко Ю. Н., Каганов Ю. Т. Пространственный поступательный механизм с тремя степенями свободы. Патент РФ на полезную модель № 133043. 2013. Бюл. № 28.
7. Григорьянц А. Г., Третьяков Р. С., Фунтиков В. А. Повышение качества поверхностных слоев деталей, полученных лазерной аддитивной технологией // Технология машиностроения. 2015. № 10. С. 68–73.
8. Пермяков М. Б., Пермяков А. Ф., Давыдова А. М. Аддитивные технологии в строительстве//European Research. 2017. № 1 (24). С. 14–15.
9. Рыбак Л. А., Гапоненко Е. В., Малышев Д. И. Разработка алгоритмов и управляющих программ для реализации движений выходного звена робота-гексапода для 3d-печати прецизионных изделий//Мехатроника, автоматизация, управление. 2016. Т. 17. № 12. С. 821–827.
10. Котельников В. А., Котельников М. В., Филиппов Г. С. Диагностика плазменных потоков с помощью ориентированных зондов. Теория и практика зондовых измерений. LAP LAMBERT Academic Publishing. 2016. С. 340.
11. Котельников В. А., Котельников М. В., Филиппов Г. С. Физическое, математическое и численное моделирование пристеночной плазмы применительно к системам авиационно-космической техники и волновым технологиям. Регулярная и хаотическая динамика. Ижевск. 2018. 280 С.
12. Аракелян В., Брио С., Глазунов В. А. Исследование особых положений манипулятора с параллельной структурой «ПАМИНСА» // Проблемы машиностроения и надежности машин. Машиноведение. 2006. № 1. С. 80–88.
13. Briot S., Arakelian V., Glazunov V. Design and analysis of the properties of the Delta in-verse robot./Proceedings of the X. International Conference on the Theory of Machines and Mechanisms. Liberec, Czech Republic, 2008. P.113–118.
14. Глазунов В. А., Брио С., Аракелян В., Грунтович М. М., Нгуен Минь Тхань. Разработка манипуляционных механизмов параллельно-перекрестной структуры. // Проблемы машиностроения и надежности машин.2008, № 2, C.100–110.
15. Glazunov V. A., Briot S., Arakelyan V., Ngyuen Minh Thanh On new class of parallel-cross mechanisms. // Computational Kinematics. Proceedings of the 5th International Workshop on Computational Kinematics. Springer-Verlag Berlin Heidelberg. 2009. P.93–100.
16. S. Lessard, P. Bigras, I. A. Bonev, S. Briot, V. Arakelian. Optimum Static Balancing of the Parallel Robot for Medical 3D-Ultrasound Imaging //12th IFToMM World Congress, Besançon (France). June18–21, 2007.
17. M. Arsicault, J.-P. Gazeau, S. Zeghloul. Mechanical hand manipulation planning using an exoskeleton. 12th IFToMM World Congress, Besançon (France), June18–21, 2007.
18. D. Salle, Ph. Bidaud, F. Cepolina. Task Based Optimization Method for the Design of Modular Minimally Invasive Surgery Instruments//ROMANSY — 2004. Montreal, Canada. — June 14–18, 2004.
19. Ph. Bidaud, F Chapelle, G Dumont. Evolutionary Optimization of mechanical and Control Design Application to Active Endoscopes//Dans les actes de RO. MAN.SY 2002. IFToMM, 1–4 juillet 2002, Udine, Italy.
20. N. Sancisi, V. Parenti-Castelli. A 1‑Dof parallel spherical wrist for the modelling of the knee passive motion//Mechanism and Machine Theory 45 (2010) P. 658–665.
21. S. Bruni, P. Cerveri, I. Espinosa. An Application of an Hybrid Robot in the Total Knee Replacement Procedure // 12th IFToMM World Congress, Besancçon (France). June18–21, 2007.
22. Yangmin Li, Qingsong Xu. Design and Development of a Medical Parallel Robot for Cardiopulmonary Resuscitation // IEEE/ASME transaction on mechatronics. Vol. 12. № 3. June 2007. P. 265–273.
23. Yangmin Li, Qingsong Xu. Dynamic Analysis of a Modified DELTA Parallel Robot for Cardiopulmonary Resuscitation // Intelligent Robots and Systems, 2005. (IROS 2005). 2005 IEEE/RSJ International Conference. P. 233–238.
Источник: журнал "РИТМ машиностроения" " 2-2019






