Исследователи попытались решить проблемы стабильности и ловкости захвата робота-манипулятора, за счет оригинального дизайна его кончиков пальцев, которые изменяют подобно оригами.
Кончики пальцев роботов в стиле оригами трансформируются, чтобы хватать и поднимать предметы необычной формы. Объем инженерных разработок, необходимых для создания одного кончика пальца робота, показал, как много мы принимаем как должное и не задумываемся о сложности природы человека!
Конструктивно оригами используется в качестве скелета кончика пальца, обеспечивая степени свободы четырех стержневых соединений в желаемых положениях, и приводимые в движение в качестве компонентов передачи. Исследователи из Гонконгского университета науки и технологий создали роботизированный кончик пальца, используя принцип, японского искусства складывания фигурок из бумаги.
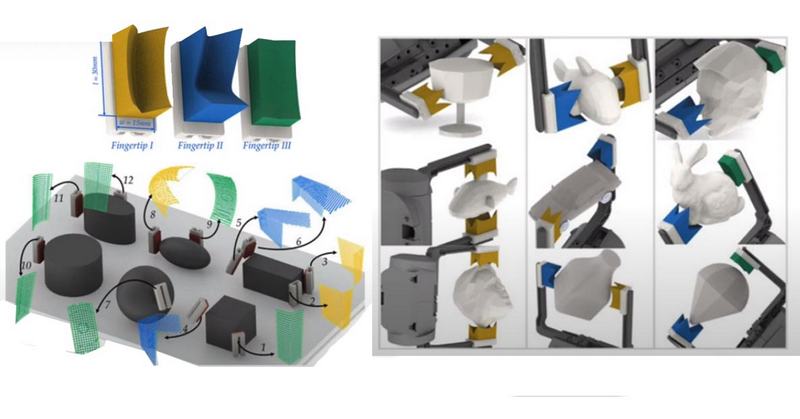
Способность изменять форму кончиков пальцев в трех уникальных конфигурациях, позволяет роботу захватывать и поднимать предметы особых, даже странных форм.
Чтобы управлять объектами и перемещать их, роботам необходимо адаптировать свои возможности для достижения стратегий манипулирования с использованием свойств объектов и окружающей среды.
Большинство структур рук роботов ограничивают их способность адаптироваться к различным объектам, что ограничивает количество движений, которые они могут совершать, оставляя только несколько простых объектов в зоне досягаемости.
Исследование основано наблюдениям в исследованиях промышленных приложений. Одно из них относится к параллельным захватам, разработанным в ходе прошлых исследований. Эти захваты требуют хорошо выбранных точек захвата, иначе статическое равновесие может быть невозможно.
Это произошло после десятилетних исследований в области разработки методов управления позами, которые должны выполняться роботами-манипуляторами для захвата различных предметов. До недавнего времени большинство существующих дизайнов сталкивались с серьезными ограничениями, которые мешали им эффективно обобщать различные объекты и формы.
Так же для стабилизации захвата инженеры должны были спроектировать специальный зажим, закрепленный на параллельном захвате для манипуляций, т.к. постоянная потребность в смене элементов захвата на сборочной линии на другую форму, приводит к неэффективной ручной замене зажимов.
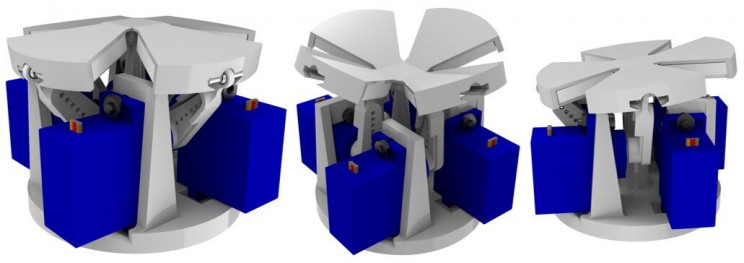
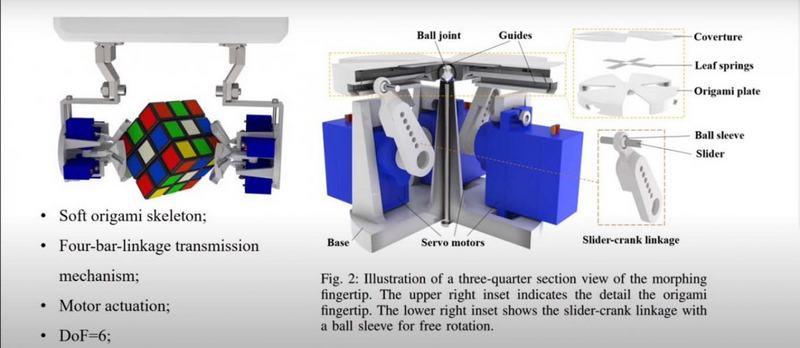
Кончик пальца манипулятора с изменяющейся формой, основанный на оригами, состоит из двух основных компонентов: мягкого скелета оригами, который работает как изменяющаяся поверхность кончика пальца, и четырех стержневых рычагов с приводом от двигателя, которые работают как механизмы передачи и приведения в действие.
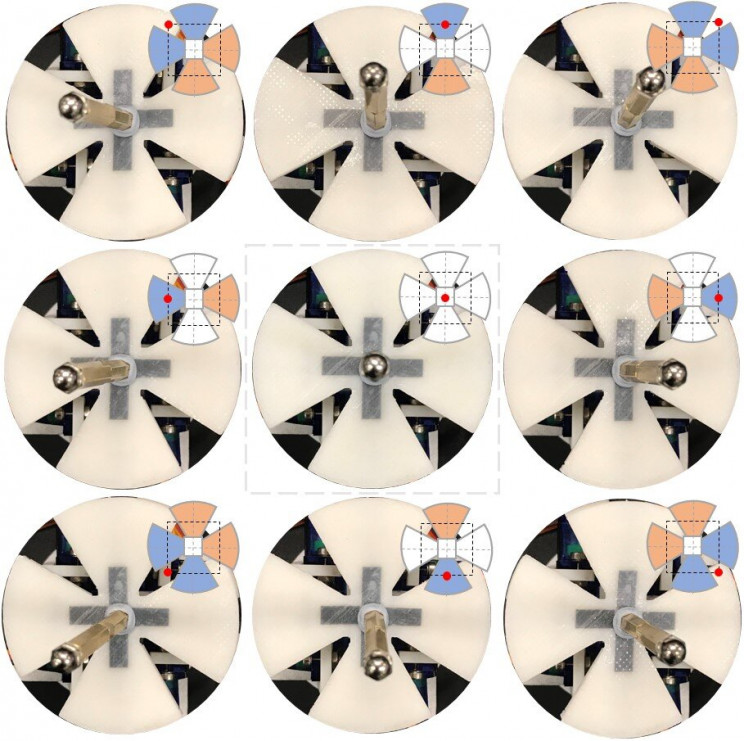
Исследователи установили шарик в центре кончика пальца, чтобы обеспечить свободное вращение в трех измерениях. Кроме того, они также установили серводвигатели (которые представляют собой класс поворотных приводов) для независимого управления четырьмя фасетками листа, расположенными на мягком скелете оригами.
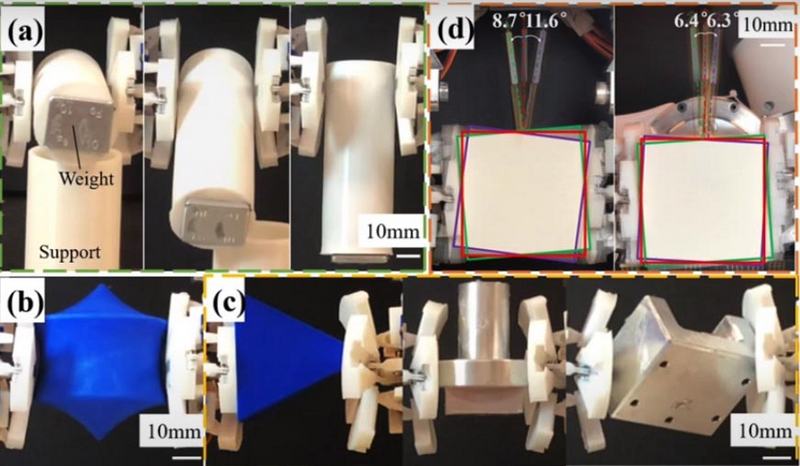
Комбинируя разные позы на каждой грани листа, можно получить множество конфигураций для различных режимов захвата, например, выпуклый режим, вогнутый режим и наклонный планарный режим.
Пальцы робота-манипулятора работают в трех режимах. Первый - выпуклый режим, с поворотом и захватом, второй - вогнутый режим для выполнения мощного захвата, а третий - наклонный плоский режим, предназначенный для переориентации и манипулирования объектами в руке.
В целом, исследовательская группа обнаружила, что кончик пальца обладает несколькими полезными свойствами, включая способность быстро переключать режимы между различными морфирующимися «примитивами» и режимами захвата, включая режимы ловкого и стабильного захвата, предназначенные для различных задач.
Еще больше новостей |