
Исследователи из Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического разработали робототехнический захват, который сможет легко манипулировать такими специфическими объектами, как кабели и веревки.
«Даже для людей манипулирование тонкими гибкими предметами может быть сложным, а для роботов это может оказаться «почти невозможным», - сказала пресс-секретарь MIT Рейчел Гордон, - Стандартным подходом для роботов до сих пор было использование «серии медленных и поэтапных деформаций» плюс использование механических приспособлений для работы с объектами».
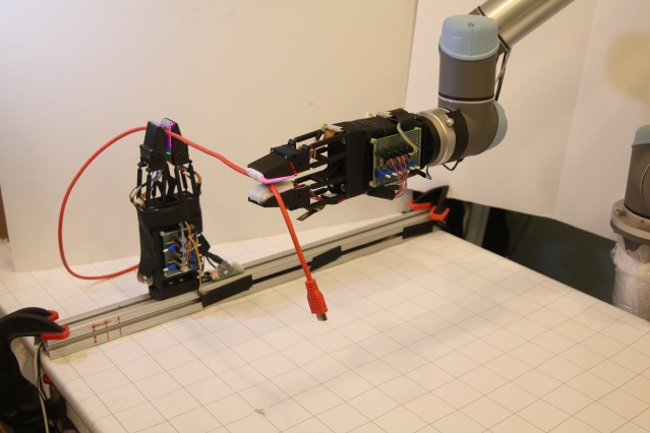
Исследователи из MIT подошли к проблеме под другим углом. Они создали специальный захват, «пальцы» которого оснащены тактильными сенсорами GelSight. Каждый такой сенсор состоит из мягкой резины, которая при контакте с объектом принимает его форму, также он оснащен встроенной камерой, считывающей полученный отпечаток для анализа. Захват смонтирован на роботизированном манипуляторе и обслуживается двумя контроллерами: один регулирует силу удержания, а другой - его положение, чтобы удерживать кабель в «пальцах» робота.
По словам Гордон, роботам сложно манипулировать кабелями, потому что для этой задачи необходимо обеспечить плавное скольжение и не допустить выскальзывание кабеля из «пальцев» захвата.
Сообщается, что робот MIT смог уверенно выполнить несколько задач, в том числе найти конец кабеля наушников и подключить его. Тем не менее, роботу было трудно вытянуть кабель назад, когда он оказался на краю «пальца». Исследователи считают, что это связано с изогнутой наружу поверхностью датчика GelSight, и ситуация может быть исправлена за счет улучшения его формы.
Еще больше новостей |

