
Инженеры из Университета Карнеги — Меллона разработали модульного робота REPAIR для поиска дефектов и ремонта газопроводов изнутри. Робот массой 27 килограмм может обследовать до 14,5 километра внутренней поверхности трубы за восемь часов и покрыть три километра быстрозастывающим составом за то же время, сообщает New Atlas.
Современные города пронизаны сложной разветвленной системой трубопроводов: водопровод, газопровод, отопление и канализация. Трубы этих сетей подвержены износу и со временем могут требовать ремонта или замены. Для облегчения поиска неисправностей и снижения затрат на их устранение инженеры разрабатывают новые инструменты. Один из перспективных подходов в этой области — использование роботов для инспекции и ремонта трубопроводов изнутри. Например, созданный сотрудниками Калифорнийского университета в Сан-Диего робот DuCTT, сконструирован специально для перемещения внутри труб и может не только осматривать их, но и умеет прочищать образовавшиеся засоры.
Прототип подобного робота для инспекции и ремонта газопроводов разработали инженеры под руководством Хауи Чозета (Howie Choset) из Университета Карнеги — Меллона. Робот, построенный в рамках программы REPAIR (Rapid Encapsulation of Pipelines Avoiding Intensive Replacement) имеет модульную конструкцию. Модуль, отвечающий за передвижение, оснащен парой колес диаметром пять сантиметров снизу и одним дополнительным сверху. Все три колеса имеют встроенные электромоторы и прижимаются изнутри к стенкам трубы, обеспечивая необходимую для движения тягу.
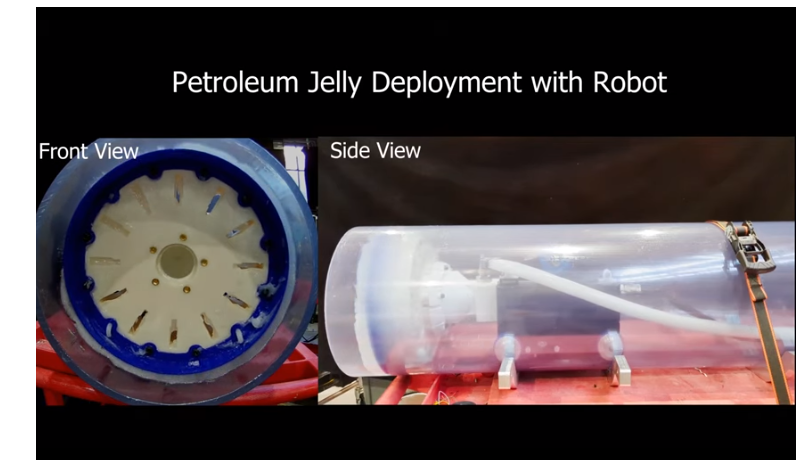
Общая масса робота составляет около 27 килограмм. Помимо модуля с колесами сюда входят также аккумулятор, картографический и ремонтный модули. Картографический модуль использует оптические сенсоры с высоким разрешением и лазер для получения изображения внутренней поверхности труб, а также для локализации и составления подробных трехмерных карт трубопроводов. Ремонтный модуль состоит из цилиндрической насадки, с помощью которой на внутреннюю поверхность трубы наносится слой быстрозатвердевающего воздухонепроницаемого состава. Он позволяет герметизировать образовавшиеся трещины изнутри, не выкапывая и не разбирая трубопровод.
Оператор дистанционно управляет роботом через кабель. Данные сенсоров модуля картографирования используются для поиска дефектов на внутренней поверхности трубы и сварных швах. В этом оператору помогает система дополненной реальности и алгоритмы машинного обучения.
В настоящее время прототип робота может пройти по трубам 61 метр. Скорость работы при этом позволяет обследовать около 14,5 километров труб диаметром 305 миллиметров за восемь часов и покрыть герметизирующим составом примерно три километра трубопровода за это же время. Со временем инженеры планируют увеличить радиус действия прототипа до двух километров. Также они работают над уменьшенной версией робота для труб диметром 152 миллиметра.
Трубопроводы небольшого диаметра, например, в авиационных двигателях, также время от времени требуют обследования и ремонта. Инженеры из Китая разработали миниатюрного робота, который способен инспектировать внутреннее состояние трубопроводов диметром меньше сантиметра. Робот состоит из нескольких быстросменных модулей, несет на себе видеокамеру и может преодолевать изогнутые участки с переменным диаметром.

